高超声速目标拦截中的多飞行器协同制导控制理论与方法
应用背景
随着临近空间高超声速飞行器武器化进程的推进,临近空间高超声速目标的拦截已经成为空天攻防领域中迫切需要解决的问题。临近空间高超声速目标具有飞行空域广、速度高、机动能力强,且其所处的临近空间的复杂气动热和电磁环境使得天基、路基和弹上测量装置均难以获得其准确的运动信息,这均给其拦截带来了挑战。本项目多飞行器协同拦截临近空间高超声速目标的机理与实现,分析了临近空间高超声速目标的运动特性,提出了多飞行器时空协同拦截方法,并研究了相关理论,可为临近空间高超声速目标防御的总体论证和制导控制提供理论方法支持。
摘要简介
本项目以临近空间高超声速目标拦截为背景,研究多飞行器协同制导控制理论与方法。首先,考虑临近空间复杂的探测环境及目标高速、大机动的运动特性,基于多飞行器协同测量信息,将探测引起的目标不确定性描述成一定分布的目标运动区域,进而,提出目标运动区域非均匀分配方法;其次,围绕提炼出来的协同制导控制问题,对混合动态博弈理论和多智能体动态覆盖控制开展有针对性的深入研究;再次,针对临近空间高超声速目标可能的机动形式,提出基于混合动态博弈理论的多飞行器协同拦截临近空间高超声速目标的协同制导策略;然后,考虑分配给每个飞行器区域的分布特性,针对点对区域的制导问题,提出基于多智能体动态覆盖控制的导引律设计方法;最后,基于飞行试验数据,完成高超声速目标运动区域建模的验证,并通过半实物仿真验证上述制导策略和导引律设计方法的有效性及制导算法的可实现性,为实际应用提供扎实的理论基础和设计方法。
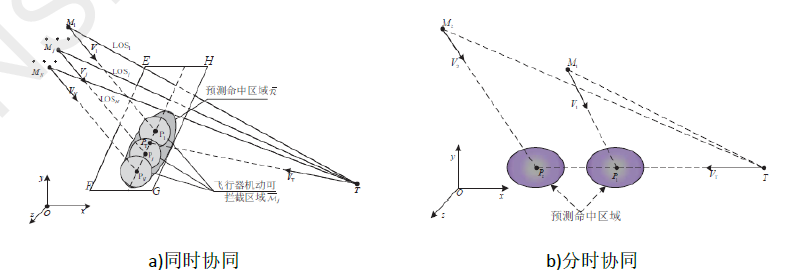
协同拦截图示